Kaynat Zehra
Ismat & Mustafa Kassam HU TOPS Scholar
Aspiration Statement
Automation, AI, and IoT excite me to build intelligent systems that solve real-world problems, and I intend to pursue a career at the intersection of technology, manufacturing, and product innovation.
Core Skills
- Arduino
- Athena
- CAD Modelling (SolidEdge, SolidWorks, Fusion 360 and FEA Analysis)
- Cloud - AWS (DynamoDB, IoT Core, Lambda, Streamlit)
- C++
- CNNs
- Embedded Systems & IoT (ESP32, MQTT, Sensor Integration)
- Javascript
- Machine Learning (PyTorch, Transfer Learning, Transformer Embeddings)
- Python
Core Demonstrated Competencies
- Adaptability
- Drive for Results
- Planning
- Takes Initiative
Preferred Career Paths
First priority: AI/Machine Learning Engineer
Second priority: Automation & IoT Engineer
Third priority: Product Manager (Tech)
Experience
Leadership / Meta-curricular
- Team Lead
- Deputy Director, Gaming Club Habib Debate Union
- Registrations Team Lead, Young Leaders Club
- Core Team Member, Multiverse Club
- Operations Team Member, Serve Club
Internship / Volunteer Work
- Habib University X Dawlance, Student Researcher - Team Lead (June – August 2025)
- Habib University, Teaching Assistant - Algorithmic Problem Solving (August – December 2024)
- HBL, Intern - SME Department (July – September 2024)
- Habib University, Teaching Assistant - Electric Circuits (September – December 2023)
Final Year Project
Project Title
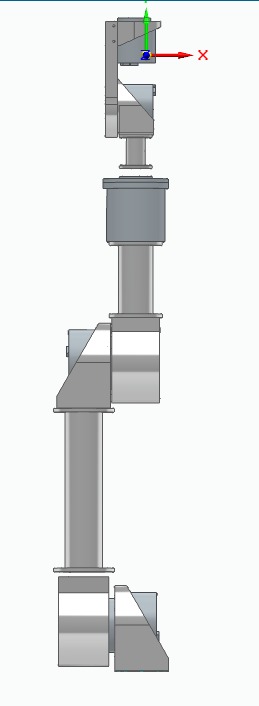
Design and Development of a 6 DOF Industrial Robotic Arm
Description
Our Final Year Project addresses a real manufacturing problem at Dawlance and Toyota Pakistan, where repetitive precision tasks like sticker placement and sealer application are done manually, causing quality variance, worker fatigue, and rework costs. We designed a locally built 6-DOF reconfigurable robotic arm achieving millimeter-level positional precision at a fraction of the cost of imported alternatives like UR5e or FANUC systems. The arm features two interchangeable end-effectors (it is reconfigurable), frameless DC motors with harmonic gearboxes selected through weighted decision matrices, aluminum links validated through SolidWorks static analysis and FEA criteria, and inverse kinematics with minimum-jerk trajectory planning. The project directly targets Pakistan's manufacturing automation gap while building industrial-grade capability at accessible cost.
Project Pictures