Hania Kashif
Aspiration Statement
I am passionate about Robotics, Embedded Systems, and Signal Processing. I want to work in Robotics and pursue a Master's degree in the same field after gaining relevant work experience.
Core Skills
- C++
- Gazebo
- Python
- ROS2
- Zephyr RTOS
Core Demonstrated Competencies
- Acts with Ownership
- Planning
- Takes Initiative
Preferred Career Paths
First priority: Robotics Engineer
Second priority: Embedded Systems
Third priority: Signal Processing and Wireless Communication
Experience
Leadership / Meta-curricular
- Orientation Leader - New Student Orientation '23
- Chair of Academic Affairs, Habib University Student Government
- Marketing Team Member, Math Club
- Security Team Member, Multiverse Club
- Runway Radio Member, Host And Content Head
Internship / Volunteer Work
- Habib University, Summer Research Internship (June – August 2024)
Publications / Creative Projects
- Publication – Poetry published in Arzu Anthology Vol.5
- Exchange Program – Selected for UC Berkeley Learn Abroad Program
- Exchange Program – Selected for Texas A&M Research Abroad Program with 50% scholarship
- Competition – Participated in the International Collegiate Programming Contest (2023, 2024 & 2025)
Final Year Project
Project Title
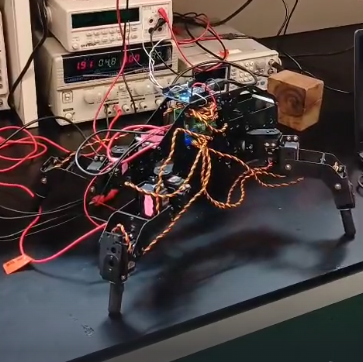
Legged Robot for Locomotion on Rough Terrain with Posture Adaptation
Description
Abrupt changes in elevation and rough terrain are some of the biggest challenges for wheeled robots. Legged robots offer the necessary versatility but pose additional challenges in terms of design and control. Our project tackles the problem of making a legged robot capable of traversing rough terrain with the ability to adapt its body posture to avoid obstacles and get through confined spaces. The project evaluates various approaches to locomotion in rough terrain within constraints. Our goal is to augment the university's T-Hex legged robot kit with necessary sensors to facilitate locomotion and perception algorithms. Through this project, we aim to cultivate an educational environment for robotics at Habib University and encourage students to make further progress within the domain.
Project Pictures