NADIA ZUBAIR
Aspiration Statement
I want to pursue my postgraduate studies in Control Systems Engineering focusing more on robotics and automation after graduation. As a career, I am inclined towards going into the industry to put my theoretical knowledge to use and increase my set of skills by practically working in the field.
Core Skills
- MATLAB
- Python/C/C++
- Arduino/PLC
- 3D Printing/Solid Works
- Adobe Illustrator/Technical Writing
Academic Awards / Achievements
- Dean’s List - 2017
- Merit Scholarship at Habib University
- 80% Habib Excellence Scholarship
Experience
Leadership / Meta-curricular
- Invent for the Planet’19 - Participant
- Robotics and Programming Summer Camp, Knowledge Valley School - Lead
Internship / Volunteer Work
- Indus Motor Company Ltd. - Production Engineer (Sep 2021 - Present), Trainee Engineer (Sep 2020 - Oct 2021)
- Habib University Fall 2019 - Teaching Assistant – Principles of Feedback & Control Systems
- SIUT, Dar-ul-Sukun and Mashal Academy - Volunteer
- Probability and Stochastic, Habib University - Work Study
- Knowledge Valley School - Managing Director
Publications / Creative Projects
- Designed and made a driverless vehicle system as part of a course project.
- Designed and Built a Ball Beam Balance system in 2019.
- Implemented an indigenous robot, capable of localizing and planting sensors in an arena.
Final Year Project
Project Title
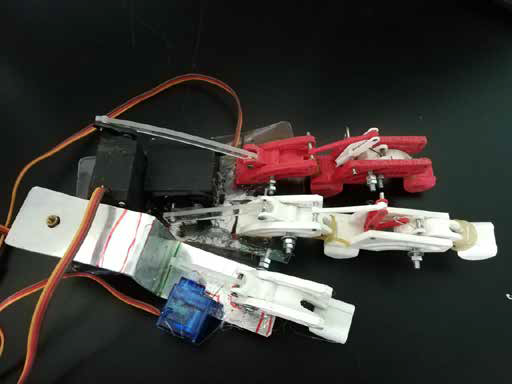
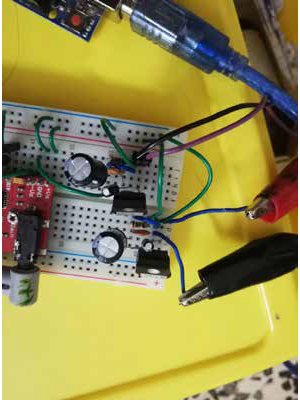
Cost Effective Electrically Powered Wrist-Hand Automated Orthotic Exoskeleton
Description
The project aims to help bring back finger movements of a post-stroke patient. The final deliverable of this project is a product that gives the patient a sense of achievement, dependency and a boost of hope. While improving their physical health and bringing back muscle control. Our approach to solving this problem is explained below: Signal Acquisition: Off-the-shelf module designing a module Control of one type of grip. Power grip was chosen as it is low precision movement because they use the bulk of the hand for force generation rather than the strength of individual fingers. Extending Control to individual movements. More freedom and types of grips to dimensional thumb movements. All of this is being done in collaboration with AKUH and their occupational therapist. (Group Project)
Project Pictures