MUHAMMAD HARIS
Aspiration Statement
I intend to pursue my postgraduate studies in the domain of controls and robotics focused towards improving human-computer interactions. As a career, I am inclined towards technical research and teaching as a professor. The other passion that I recently discovered is Urdu writing.
Core Skills
- MATLAB
- Python
- Open Pose, Open CV
- Raspberry Pi, Linux
- ROS
- Strategic Planning
- Game Development
Academic Awards / Achievements
- McMaster University - MEng Electrical and Computer Engineering
- High Academic Achievement in Spring 2019
- President’s List in Spring 2019
- Dean’s List - Fall 2019, Spring 2018, Fall 2017 & Spring 2017
- High Academic Achievement in Spring 2018
Experience
Leadership / Meta-curricular
- Basic LaTex and MATLAB Workshop by EHSAS center
- Habib University Debating Championship - Deputy Chairman Finance Department
Internship / Volunteer Work
- SolvenEvolve - Academic Assistant
- Rockford Cambridge School - Logistics and Finance Manager Intern
- Habib University - Teaching Assistant
Publications / Creative Projects
- Scheduling Algorithms in an ADHoc Network: A hybrid CDMA and TDMA technique is employed to demonstrate an efficient MUD algorithm followed by multi-hop routing in an Ad-hoc network using RF modules and Arduinos.
- Child Health Monitoring Device: Monitoring device for children under supervision which alerts the nearest doctors and parents in case of an emergency.
- Self-Balancing Robot: In order to solve the problem a PID controller was implemented using an Arduino.
Final Year Project
Project Title
AEGIS - Virtual Self-defense Trainer
Description
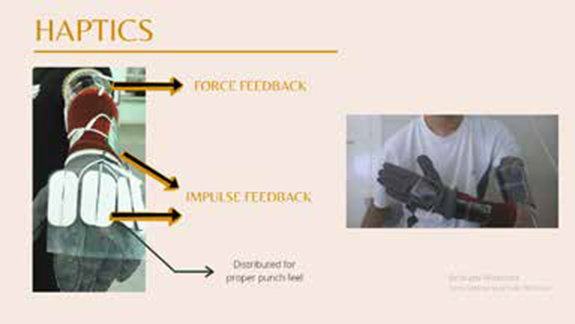
We are making a virtual self-defence trainer. We use a camera and OpenPose to track the movement of the user to provide performance-based reviews, and trigger haptic feedback to simulate a human trainer. I am using electric muscle stimulation (EMS) for haptic feedback in the form of tactile feedback and force feedback. The force feedback locks the arm to prevent the user from penetrating into the virtual objects. Currently, we have implemented a small proof of concept that simulates a punch in the virtual world giving tactile sensation on the fists and locks the arm to prevent penetration in to the virtual wall. My FYP targets a social issue and is designed especially for women belonging to third world countries. It teaches a set of moves and evaluates the pose of the user assigning them score and giving them feedback. We have submitted the findings to an international conference as well. (Group Project-Interdisciplinary)
Project Pictures