DANYAL ADMANI
Aspiration Statement
I am driven by the desire to acquire new skills, explore new ways of mental stimulation, and attain a deeper understanding of the underlying laws and inner workings of the world we live in. I am interested in using technology and interdisciplinary approaches to solve real-world problems and enable the deployment of solutions.
Core Skills
- Mathematical Modelling, Signal Processing
- Image Processing, Machine Learning
- IMUs, Sensor Interfacing, Python
- MATLAB, Simulink, LaTeX
- Arduino, LoRa/LoRaWAN
- UI/UX Design, C++
- Computer Vision, OrCAD PSpice
- Research and Development (R&D)
- Product Development & Design
Academic Awards / Achievements
- Selected for University of Michigan Summer Program with a 75% scholarship.
- Dean’s List - Spring 2018
Experience
Leadership / Meta-curricular
- Physics and Astronomy Club - Chief Management Officer
- Propulsion Team for Automobile Club - Head
- Shell Eco Marathon Participant
Internship / Volunteer Work
- Seagold (Pvt) Ltd. - Head of Product (Jan 2022 - Present)
- Truckbehtar - Founder
- Seagold (Pvt) Ltd. - Intern
- The Citizens Foundation - Intern
- Algos Health - Co-Founder
- Nixor College - Physics TA
Publications / Creative Projects
- Developed a 2D game “Jack and the Treasures” on Unity to help in learning sign language. The game was published on Google Play store and has more than 500 downloads.
- Opportunity Portal for students - Google CodeU Program Built a collaboration portal for opportunities in Pakistan for students using Google Cloud Platform APIs and created dynamic and interactive visualizations for the front-end of the web application.
Final Year Project
Project Title
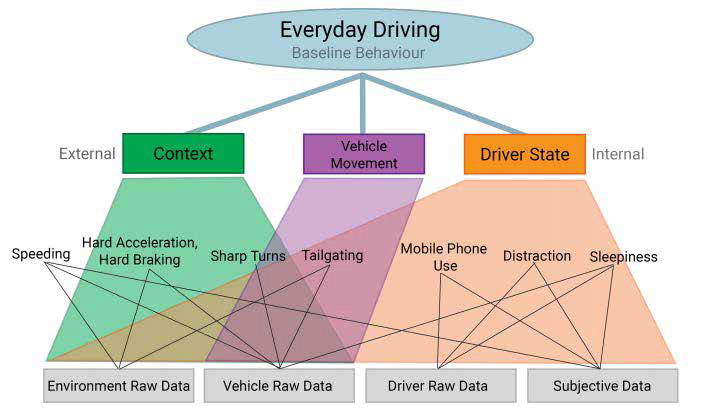
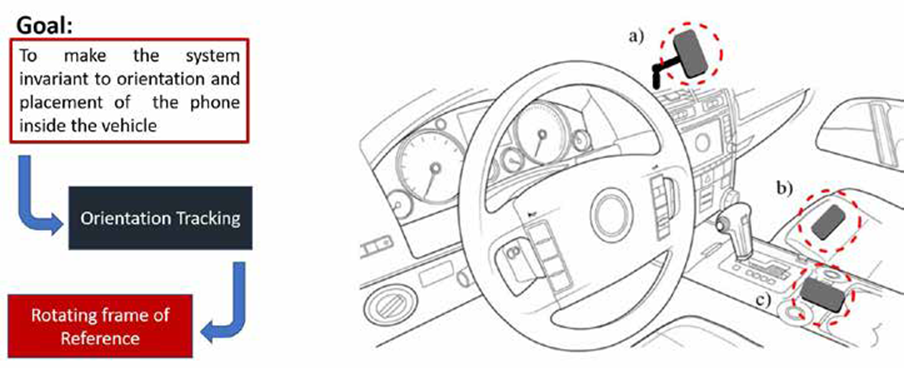
Driver Scoring System
Description
A low cost Inertial Measurement Unit (IMU) + GPS Unit based on Arduino Nano with SD card logging capabilities and wireless communication was assembled and powered by a 3.7 V Lithium-ion battery. AHRS and variants of the Kalman filter were used as sensor fusion algorithms to map the trajectory of the vehicle to a much higher accuracy than can be obtained using solely GPS Data. A machine learning algorithm trained to detect manoeuvres from raw timeseries IMU data to assign a driver score aimed at reducing exposure to risk and fuel consumption based on targeted feedback. (Group Project-Interdisciplinary)
Project Pictures